
Popular scientific abstract
Vehicle automation has become the new normal as it has significantly accelerated over the past years and has become a sudden research trend and hot topic in the transportation industry and academic worlds. This is a result of the findings that automated vehicles (AVs) are becoming technically achievable, and also acknowledged benefits that automation systems could provide to societal ergonomics and global economics. However, there still exists a knowledge gap in fathoming the long-term effects of automation systems on users’ behaviour, and essentially still a long way to go concerning knowledge discovery in terms of making them a safety net and a central part of everyday life, on-road and in-traffic. Importantly, more long-term studies should be considered that emphasise learning effects over long-term use and interaction.
Who am I?
 | My name is Naomi Yvonne Mbelekani (M.Sc), I am a research associate and PhD candidate at the Chair of Ergonomics (Lehrstuhl für Ergonomie), TUM School of Engineering and Design. |
My affiliation
My host university is the Technical University of Munich (Technische Universität München). I am a PhD and employed by the Chair of Ergonomics (Lehrstuhl für Ergonomie) in the School of Engineering and Design.
Main Supervisor:
Prof. Dr. Klaus Bengler (TUM) : bengler@tum.de
Background
Essentially, while there has been some progress in the design and development of AVs to aid in mobility issues, many human factors issues remain and call for further research. We aim to provide insight that aids safe and risk-free interaction design strategies for human-automation interactions (HAI) and bridges the knowledge gap in human factors and ergonomics engineering long-term research.
In a sense, we aim to examine several scenarios to synthesize how the user might possibly interact with driving automation (over the sequence of time) in order to understand behavioural adaptability/changeability (BAC) as a result of long-term effects. Thus, investigating the relationship between experience – trust – acceptance as a cause-effect process over the sequence of time, from short-term – mid-term to long-term. As a result, generate levels of understanding pertaining to automation effects.
The study will use advanced driving simulators as a basis for improving understanding of how AV users’ experience, trust, and acceptance of AVs change with long-term/repeated use in urban traffic. An evaluation of AV interaction design strategies will be performed, and patterns of learning strategies of AV users (“drivers/passengers”) by user types will be established.
Aims and objectives
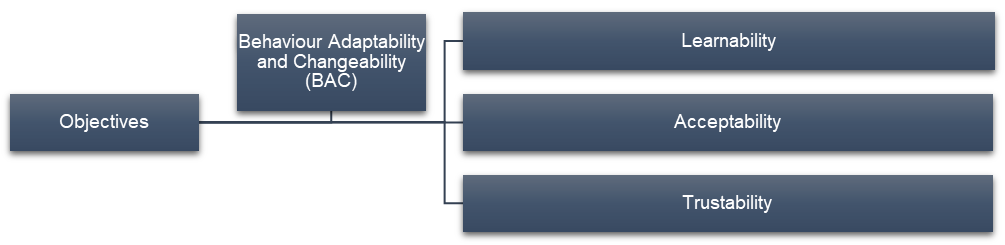
Aim: Investigating behavioural adaptability/changeability (BAC) towards automation based on long-term effects by measuring learnability, trustability and acceptability.
The research objectives are divided into 3 stages:
- Defining what is long-term and how long is long enough concerning users’ BAC and mental models.
- Incorporating different user types in different interaction design strategies:
- Increasing understanding of long-term learnability and trustability for various interaction scenarios, and comparing learnability and trust patterns/trajectories to acceptance.
The results from this project aim to enhance knowledge of AV users’ acceptance patterns, trust, and learning effects towards automation systems for various interaction scenarios.
My publications
- Mbelekani, N.Y. & Bengler, K. (2022). Interdisciplinary Industrial Design Strategies for Human-Automation Interaction: Industry Experts’ Perspectives. Interdisciplinary Practice in Industrial Design, Vol. 48, 2022, 132–141. https://doi.org/10.54941/ahfe1002025
- 1.Mbelekani, N.Y. & Bengler, B. (2022). Automation-induced efficiency and inefficiency: Transformative views from air and ground vehicle industry experts. In Transport Research Arena (TRA), Elsevier.
- Mbelekani, N.Y. & Bengler, K. (2022). Traffic and Transport Ergonomics on Long Term Multi-Agent Social Interactions: A Road User’s Tale. M. Rauterberg et al. (Eds.): HCII 2022, LNCS 13520, pp. 499–518, 2022. Springer Nature Switzerland AG 2022. https://doi.org/10.1007/978-3-031-18158-0_36
- Mbelekani, N.Y. & Bengler, K. (2023, in press). Learning design strategies for optimizing user behaviour towards automation: Architecting quality interactions from concept to prototype. In HCII2023, Springer Nature.
- Mbelekani, N.Y. & Klaus Bengler. How long is long enough? An expert devised research design strategy and standardisation for investigating long-term effects – A framework (Forthcoming)
References and links
Aria, E., Olstam, J., & Schwietering, C. (2016). Investigation of Automated Vehicle Effects on Driver’s Behavior and Traffic Performance. ISEHP 2016. International Symposium on Enhancing Highway Performance. Transportation Research Procedia. Volume 15, 2016, Pages 761–770. doi: 10.1016/j.trpro.2016.06.063